1、概述
罩極電機(jī)是微型單相感應(yīng)電動(dòng)機(jī)中最簡單的一種.由于它具有結(jié)構(gòu)簡單,制造方便,成本低廉,運(yùn)行可靠,過載能力強(qiáng),維修方便等優(yōu)點(diǎn)而被廣泛地用于各種小功率驅(qū)動(dòng)裝置中.其缺點(diǎn)是運(yùn)行性能和起動(dòng)性能較差,效率和功率因子較低,一般用于空載或輕載起動(dòng)的小容量場合����,如電風(fēng)扇等���。
2、工作原理
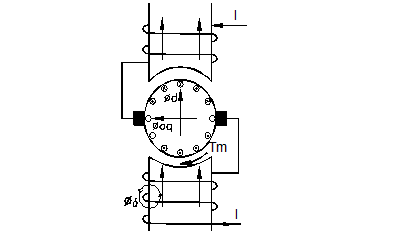
一個(gè)沒有罩極環(huán)僅有主繞組的電機(jī), 是沒有起動(dòng)轉(zhuǎn)矩, 在實(shí)際中無法使用, 為了獲得起動(dòng)轉(zhuǎn)矩, 采用附加副繞組的措施����。這個(gè)繞組不是靠外接電源供電, 而是靠它與主繞組軸線間保待有θ<90的偏角, 見圖1。主繞組通電后, 其中一部分主磁通Φm’會穿過這一短路環(huán), 感應(yīng)電勢產(chǎn)生電流, 短路環(huán)則如變壓器的副繞組一樣, 產(chǎn)生去磁通Φk, 與Φm’合成后在罩極區(qū)間將是Φs, 最后決定了罩極環(huán)上的電勢Ek, 這樣在主極與罩極的不同區(qū)間使有時(shí)間相位不同的Φm與Φs在脈振, 構(gòu)成了橢圓磁場, 產(chǎn)生了起動(dòng)轉(zhuǎn)矩���。在轉(zhuǎn)子是閉路的條件下, 轉(zhuǎn)子就會起動(dòng)�。由于Φm是超前Φs的, 磁場是從超前的磁通移向滯后的, 所以電機(jī)的旋轉(zhuǎn)方向是由主極移向罩極的順時(shí)針方向�����。
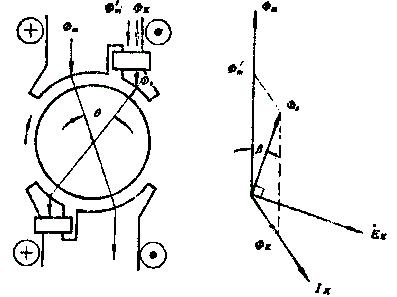
a)工作原理 (b) 矢量圖
圖1罩極電機(jī)的原理及矢量圖
3.技術(shù)指針及術(shù)語
3.1 技術(shù)指針
額定功率
額定電壓
額定電流
額定轉(zhuǎn)速
3.2 術(shù)語
3.2.1效率:電機(jī)輸出功率與輸入功率之比�。
3.2.2功率因子COSØ:電機(jī)輸入有效功率與視在功率之比。
3.2.3起動(dòng)扭力Tst:電機(jī)在額定電壓, 額定頻率和轉(zhuǎn)子堵住時(shí)所產(chǎn)生的扭力��。
3.2.4最大扭力Tmax:電機(jī)在額定電壓, 額定頻率和運(yùn)行溫度下,轉(zhuǎn)速不發(fā)生突降時(shí)所產(chǎn)生的最大轉(zhuǎn)矩�。
3.2.5噪音:電動(dòng)機(jī)在空載穩(wěn)態(tài)運(yùn)行時(shí)A計(jì)權(quán)聲功率級dB(A).
3.2.6振動(dòng):電動(dòng)機(jī)在空載穩(wěn)態(tài)運(yùn)行時(shí)振動(dòng)加速度有效值(m/s2)
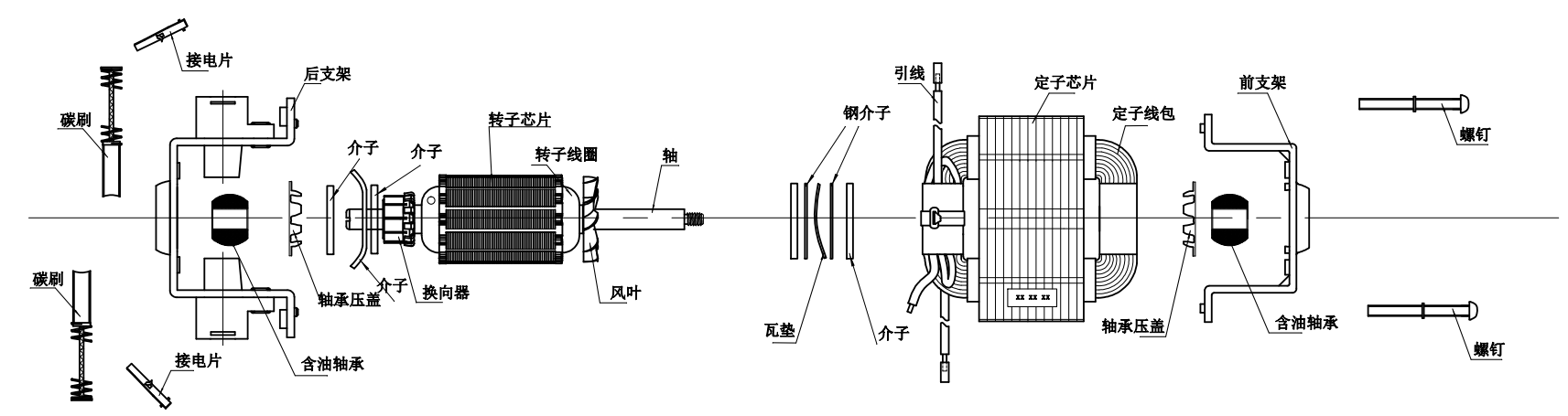
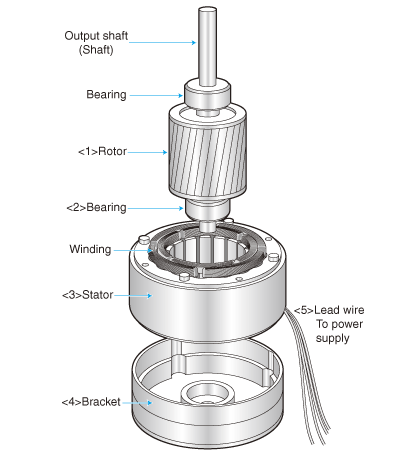
4.基本結(jié)構(gòu)
罩極電機(jī)是結(jié)構(gòu)最簡單的一種單相電動(dòng)機(jī),其結(jié)構(gòu)可分為兩類.一是隱極式,從外形來看,定轉(zhuǎn)子均勻開槽,轉(zhuǎn)子為鼠籠式.定子上有主繞組和自行閉路的副繞組或稱為罩極繞組.兩繞組可以作成等線圈式,也可分別作成正弦繞組.不過兩繞組要不成正交的安放,即繞組軸線間夾角小于90度. 它的定子上有主副相兩套繞組, 但其主繞組大多采用集中繞組形式, 副繞組則是一個(gè)置于局部磁極上的短路線圈, 即罩極線圈(也稱短路環(huán)).這類電機(jī)又可分為兩種,一種如圖1(b)所示的圓形結(jié)構(gòu),它的定子可明顯的看出凸極型式.主繞組套在磁極上,罩極環(huán)則嵌于磁極一角,且多為一個(gè).另一種是方型結(jié)構(gòu),鐵芯如變器一樣,見圖1(a),主繞組被套于一根鐵心柱上,磁極與轉(zhuǎn)子則在鐵芯的另一根柱上,在磁極一角多放兩個(gè)罩環(huán)。在罩極電機(jī)中, 只要設(shè)法產(chǎn)生旋轉(zhuǎn)的氣隙磁場, 電機(jī)就有自起動(dòng)能力, 并可正常運(yùn)轉(zhuǎn)���。在罩極電機(jī)中, 定子主副相繞組��、軸線在空間非正交安置, 并為了改善罩極電機(jī)的性能, 采取了各種措施, 如階梯氣隙, 磁橋等, 出現(xiàn)了磁的不對稱, 又因副繞組中的電流是靠主繞組感應(yīng)產(chǎn)生的, 造成了電的不對稱, 分別產(chǎn)生時(shí)間和空間相位都不相同的磁勢, 合成為一個(gè)類似旋轉(zhuǎn)磁勢的運(yùn)動(dòng)磁勢, 它在空間建立的運(yùn)動(dòng)磁場與轉(zhuǎn)子相互作用, 就可以使之起動(dòng)和運(yùn)轉(zhuǎn)��。
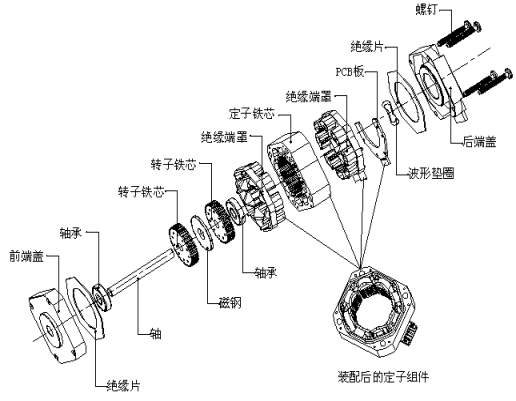
其結(jié)構(gòu)形式如圖2所示:
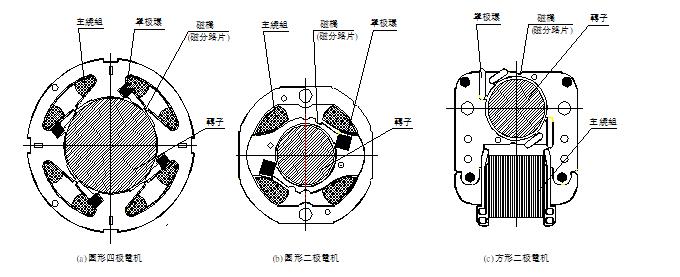
圖2 罩極電機(jī)的三種典型結(jié)構(gòu)
5.特性分析
5.1 罩極電機(jī)效率是偏低的,僅在=(5~30)%之間,因此多用在小功率驅(qū)動(dòng)中.
5.2 罩極電機(jī)的主,副相電流變化均不大,故多以電機(jī)不動(dòng)時(shí)的電流來計(jì)算它的損耗和溫升.所以罩極電機(jī)會在堵轉(zhuǎn)時(shí)運(yùn)行也不致發(fā)生問題.運(yùn)行可靠是它的最大優(yōu)點(diǎn)�����。
5.3 罩極電機(jī)的起動(dòng)和最大轉(zhuǎn)矩倍數(shù)規(guī)定為T*st=0.3, T*max=1.3, 均屬偏小 .因此,罩極電機(jī)主要用于對起動(dòng)轉(zhuǎn)矩要求不高的地方�。
5.4 罩極電機(jī)經(jīng)特殊設(shè)計(jì),可以在兩個(gè)方向上旋轉(zhuǎn).這樣的罩極電機(jī)磁極在兩個(gè)極尖上都開有放罩極繞組的槽口.根據(jù)需要閉合一個(gè)罩極繞組,電機(jī)就在那個(gè)方向旋轉(zhuǎn)���。
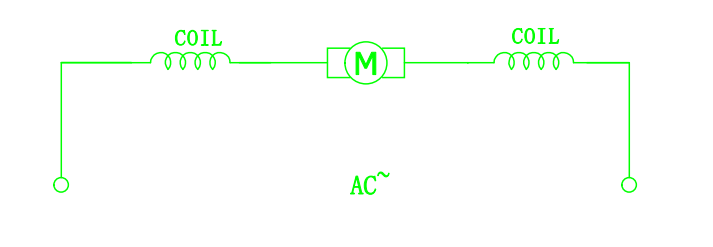
5.5 罩極電機(jī)可以像單相異步電機(jī)那樣采用降壓或抽頭調(diào)速.繞組抽頭調(diào)速的電機(jī),就是在電機(jī)的繞組上附加多繞些調(diào)速線圈.把這些調(diào)速線圈串入回路連于電源上去時(shí),如同電機(jī)回路中串入一個(gè)電抗一樣,達(dá)到了降速的目的����。
6.結(jié)構(gòu)因素對性能的影響
6.1 磁橋(磁分路)
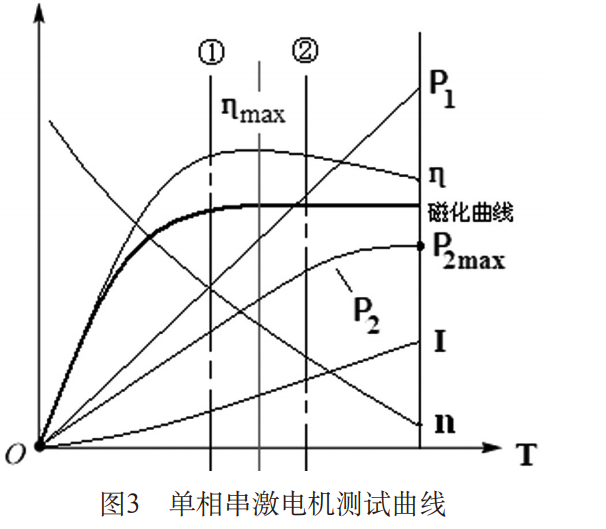
磁橋的作用是改善氣隙的磁通分布,改善電機(jī)的機(jī)械特性.引入磁橋是故意增大極間漏磁,雖降低了激磁電抗,使激磁電流增大,最大轉(zhuǎn)矩減小,但由于磁橋磁通Φb不與轉(zhuǎn)子匝鏈,從而增加了主,副繞組的互磁通,使一個(gè)極下的氣隙磁通由矩形變?yōu)樘菪?如圖3d所示,從而減小了諧波分量�����。
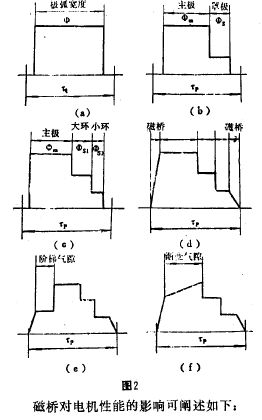
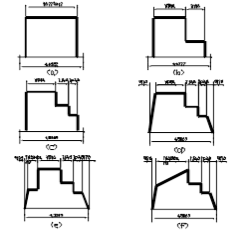
圖 3
磁橋?qū)﹄姍C(jī)性能的影響可闡述如下:
6.1.1轉(zhuǎn)矩轉(zhuǎn)速特性(T-n)曲線
若取消磁橋,電機(jī)漏磁減小,使激磁電抗增大,電機(jī)的最大轉(zhuǎn)矩Tmax增大.但是,由于此時(shí)氣隙磁通由梯形變?yōu)榫匦尾?諧波增大,從而諧波轉(zhuǎn)矩分量(主要是3次)增大,使電機(jī)在中低速區(qū)的T減小并產(chǎn)生明顯的凹下.若磁橋太寬,造成漏磁太大,使激磁電抗降低過多,雖然諧波小了,T-n曲線趨于平滑,但根據(jù)磁通連續(xù)性定理,氣隙磁通必然減小,不但Tmax下降過多,而且也導(dǎo)致Tst減小,故亦不可取�。
6.1.2起動(dòng)轉(zhuǎn)矩Tst
當(dāng)磁橋?qū)挾葟?增加時(shí),Tst先是較快增大,過最大值(此時(shí)應(yīng)為最佳寬度)后逐漸下降.合適的磁橋?qū)挾瓤墒筎st增大到無磁橋時(shí)的1.2~1.5倍。
由此可見,磁橋?qū)挾仁侵匾?為了既能改善磁橋磁勢波形,又不致使轉(zhuǎn)矩下跌過多,磁橋設(shè)計(jì)時(shí)總使其處于磁密過飽和狀態(tài).一般取磁橋磁密在2.2T以上,以限制它的過度漏磁.為此,在初始設(shè)計(jì)中可如下取值: 在圖2a中,為保持一定剛度,磁分路片不能太薄,故可減小其軸向長度,可取鐵芯迭長的1/2~1/3.在圖2b,c中,兩凸極由極尖相連而成一體,為保證機(jī)械強(qiáng)度,顯然極尖寬度不能太小,故用作磁橋是不行的.為此應(yīng)在靠近交軸線處的外側(cè)沖制對稱的兩個(gè)半園凹口,以其剩下的寬度作為磁橋?qū)挾?一般取原寬度之半,因?yàn)閺姆悼纯珊唵握J(rèn)為每極磁通在整個(gè)極中分布均勻,即極內(nèi)磁密處處相等,而凸極中磁密總在1.1~1.5T左右,今磁橋?qū)挾热魹闃O尖寬度的1/2,則磁橋中磁密總在2.2T以上��。
圖5示出了某8W方形電機(jī)磁橋?qū)挾葘C(jī)械特性的影響����。
6.2 階梯氣隙
在前極尖處局部增大氣隙,即成階梯氣隙.氣隙大了,磁阻就大,由于磁力線總是力圖縮短其路徑,故階梯氣隙中的磁通密度總是小于主氣隙的.從電磁比看,階梯氣隙磁阻與主氣隙的磁阻相并聯(lián),磁阻(電阻)大者磁通(電流)小.因此,階梯氣隙的采用使一個(gè)極下的氣隙磁通由矩形波變?yōu)殡A梯波,如圖3e所示,從而減小了諧波分量.效果比階梯氣隙還要好的是漸變氣隙,由于從前極尖開始?xì)庀堕L度逐漸減小,從而使氣隙通波成為斜坡形,如圖3f所示���。與階梯氣隙起同樣作用的還有前極尖處沖制閉合長孔(園形電機(jī))或外側(cè)沖制長凹口(方形電機(jī)),用增大局部區(qū)間磁阻的辦法使該處氣隙磁通小于主氣隙。但由于漸變氣隙難于控制,沖長孔又模具復(fù)雜,故實(shí)際中已很少采用���。
階梯氣隙的作用不光可改善運(yùn)行性能,而且可增加起動(dòng)轉(zhuǎn)矩.這也正是磁力線的特征造成的,在階梯氣隙與主氣隙交界處,部分磁通從主氣隙上的定子出發(fā)到達(dá)階梯氣隙上的轉(zhuǎn)子,也就是說磁力線向階梯氣隙處扭彎,使路徑變長,磁阻增大,而轉(zhuǎn)子則力求以磁路磁阻最小來取向,這樣就產(chǎn)生了一個(gè)由大氣隙向主氣隙方向的轉(zhuǎn)矩�����。由于階梯氣隙位于前極尖處,該轉(zhuǎn)矩與旋轉(zhuǎn)磁場方向是一致的�。
階梯氣隙長度δc和寬度(以弧角表示)θc對T-n曲線的影響如下: δc不變θc加大,或θc不變δc加大,兩者效果大致相同.當(dāng)δc(θc)加大時(shí),Tst和Tmax都會增大,而且由于諧波轉(zhuǎn)矩減小的緣故,中速區(qū)的凹下減小��。但過大的δc(θc)將使Tmax反而減小,并且特性變軟,工作點(diǎn)的轉(zhuǎn)差率增大,從而損耗增加,效率降低,不過Tst則比無階梯氣隙時(shí)始終要大一些��?���?梢?delta;c和θc的取值是很重要的.根據(jù)資料推薦,一般取值蕩圍在δc/δ=2.5~3.5,θc/θp=0.15~0.20。
6.3 罩極環(huán)
罩極環(huán)的作用是使定子產(chǎn)生一個(gè)旋轉(zhuǎn)磁場脈掁磁通Φ.沒有罩極環(huán)時(shí),僅由主繞組構(gòu)成單繞組電機(jī),在氣隙中產(chǎn)生一個(gè)脈掁磁通Φ, 如圖3a, 故而電機(jī)非但沒有起動(dòng)能力,而且運(yùn)行時(shí)的正轉(zhuǎn)矩較小.有了罩極環(huán),Φ的一部分Φm穿過主氣隙,另一部分Φ1穿過罩極區(qū),從而在環(huán)內(nèi)感生電流���。由于罩極環(huán)是個(gè)感性組件,環(huán)內(nèi)電流產(chǎn)生的磁通恒為阻止Φ1的變化,從而造成了罩極區(qū)的合成磁通Φs滯后于主磁通Φm.這樣,氣隙中就有了二個(gè)脈掁磁通Φm和Φs,如圖3b����。由于Φm和Φs在時(shí)間上有一相位差,兩軸線在空間又錯(cuò)開一個(gè)角度,從而合成一個(gè)旋轉(zhuǎn)磁場,產(chǎn)生起動(dòng)轉(zhuǎn)矩,使電機(jī)起動(dòng)和運(yùn)轉(zhuǎn)。但是,由于兩者的軸線夾角θ小于90°(θ=90°時(shí)將感應(yīng)不出Φs了),相角差?也小于90°(因環(huán)有電阻),再有Φs又小于Φm,故兩者的合成磁場永遠(yuǎn)是個(gè)橢圓.并且由于Φs恒滯后于Φm,故合成磁場的旋轉(zhuǎn)方向總是從主極移向罩極,即電機(jī)是不能改變轉(zhuǎn)向的����。
6.3.1罩極度
罩極度Ks定義為罩區(qū)磁極寬度占整個(gè)磁極寬度的百分比,它的大小對電機(jī)性能 影響很大.假如兩個(gè)脈掁磁場的強(qiáng)度相同,則Ks越小,兩軸線夾角θ就越接近90°,旋轉(zhuǎn)磁場的橢圓度越小。但是,由于Φs是主繞組感應(yīng)產(chǎn)生的,Ks越小, Φs越弱,旋轉(zhuǎn)磁場的橢圓度越大.由此可知,勢必存在一個(gè)最佳的Ks值,它權(quán)衡了二個(gè)磁場的夾角和幅值,使合成磁場的橢圓度最小��。分析與實(shí)驗(yàn)表明,單罩環(huán)電機(jī)的最佳罩極度為33%(即1/3)左右,此時(shí)的Tmax和Tst均較大,而且T-n曲線也比較平坦.由實(shí)驗(yàn)知道,Ks大時(shí),T-n曲線的中速區(qū)凹下很小,但Tst較低���。極限Ks=100%時(shí),主副繞組軸線重合,相當(dāng)于一臺短路變壓器,副繞組中感生電流最大,這時(shí)只能產(chǎn)生脈掁磁場,Tst=0.減小Ks時(shí),Tmax變化很小,Tst先增大,但中速區(qū)凹下逐漸變大;小于33%以后,Tst又趨減小,極限Ks=0時(shí),Tst=0。在方形鐵芯中,由于結(jié)構(gòu)上的允許,一般采用二個(gè)罩環(huán),構(gòu)成三繞組電機(jī)�����。在三相對稱電機(jī)中,一個(gè)極(180°電角度)中每相各占60°,即60°相帶.而雙環(huán)電機(jī)雖不可能實(shí)現(xiàn)這種對稱分布,但道理是一樣的,從而大小環(huán)取長補(bǔ)短,電機(jī)特性明顯比單環(huán)好得多:Tmax和Tst均增大,且中速區(qū)下凹不嚴(yán)重.實(shí)驗(yàn)表明,在雙環(huán)電機(jī)中,當(dāng)主極取110°左右,大環(huán)70°左右,小環(huán)則在大環(huán)的70°中占40°左右時(shí),電機(jī)特性較好.換句話說,一般取大環(huán)Ks1=40%,小環(huán)Ks2=22%左右���。
前面講過.為了獲得大的輸出轉(zhuǎn)矩,合成磁場應(yīng)盡可能接近圓形.為此要求Φm與Φs具備三個(gè)條件:強(qiáng)度相等,軸線在空間相差90°電角度以及相位角相差90°.但這是相互矛盾的:由于Φs是主繞組磁通Φ感生的,故主副繞組軸線夾角越近90°,兩者的互感應(yīng)越小,即Φs越弱.在極限位置90°時(shí),主繞組產(chǎn)生的磁通不能穿過副繞組,這時(shí)副繞組中就不能感生電流,從而Φs為0,不能產(chǎn)生轉(zhuǎn)矩.為了在較小的罩極度時(shí)能產(chǎn)生較大的副相磁通Φs,采用磁橋是完全必要的.由于磁橋的存在,使一小部分磁通不經(jīng)由氣隙-轉(zhuǎn)子-氣隙從一個(gè)極到達(dá)另一個(gè)極,而是通過磁橋,也就是說這一小部分磁通是不與轉(zhuǎn)子匝鏈的是屬于漏磁通��。這樣一來,由于罩極環(huán)中的部分磁通不通過氣隙,故罩極環(huán)部分的磁路磁阻減小,從而環(huán)中的磁通Φs增大.也可理解為磁橋增加了主副繞組之間的互感,從而互感通增大�����。
6.3.2罩環(huán)阻抗
罩環(huán)的位置確定以后,其本身的參數(shù)對電機(jī)性能也有很大影響.罩環(huán)電阻rs對起動(dòng) 轉(zhuǎn)矩有一最佳值,rs過大或過小,均會使Tst下降.在通常所見的電機(jī)中,一般來說,凡是僅有一匝的粗銅線或扁銅線,rs偏小,而用漆包線繞制的多匝型副繞組則rs偏大.rs偏大時(shí),在空間位置許可的情況下,可盡量換用粗一檔線�。對rs偏小的電機(jī),若換用黃銅之類的等直徑線,電密不變,rs又提高了,是電機(jī)性能將改善.罩環(huán)漏抗xs的增大將使Tst下降,為此罩環(huán)端盡可能緊貼迭片,且其槽應(yīng)盡量靠近定子內(nèi)徑,以力求減小其漏磁通����。
6.3.3罩環(huán)的損耗
盡管罩環(huán)的匝數(shù)少,環(huán)內(nèi)的感應(yīng)電勢很小,但由于其阻抗極小,故環(huán)內(nèi)電流通常是很大的,使損耗很大,溫度很高,尤其是在堵轉(zhuǎn)時(shí),可達(dá)150°C以上(半導(dǎo)體點(diǎn)溫度計(jì)).由于罩環(huán)是參與運(yùn)行的,從而使電機(jī)的效率很低,也使電機(jī)具有在超載甚至堵轉(zhuǎn)時(shí)整機(jī)電流變化不大,不易發(fā)生故障的優(yōu)點(diǎn)�����。若電機(jī)設(shè)計(jì)不合理或罩環(huán)接頭焊接不良,罩環(huán)發(fā)熱將相當(dāng)嚴(yán)重,甚至可燒斷焊點(diǎn),使電機(jī)不能正常工作,因此罩環(huán)的焊接質(zhì)量是絕對不能輕視的����。
6.4 主繞組阻抗(電阻r1及漏抗x1)
是主繞組阻抗增大, 其上的壓降增大, 由于這是屬于無用的消耗, 導(dǎo)致繞組中感應(yīng)電勢降低, 由于感應(yīng)電勢為E1= , 當(dāng)電源頻率f和匝數(shù)W1不變時(shí), E1降低, 意味眷每極磁通Φ減小, 從而電機(jī)出力減小.增大主繞組電阻r1時(shí), 損耗增加, 輸出減小, 溫升增加, 但是, 當(dāng)r1增加時(shí), 并不是輸出的減小等于損耗的增加, 而是損耗增量中的一部分由電源輸入來補(bǔ)償, 一部分由輸出減小來補(bǔ)償. 因此, 增小r1( 例如線徑減細(xì)一檔)而不減變匝數(shù)時(shí), 對固定負(fù)載而言, 電機(jī)的輸入增大, 輸出略有減小, 轉(zhuǎn)速有所降低, 功率因子則略有上升, 溫升明顯上升. 對風(fēng)葉類活動(dòng)負(fù)載而言, 由于其功耗基本上與轉(zhuǎn)速的三次方成正比, 轉(zhuǎn)速稍減時(shí), 所需轉(zhuǎn)距下跌很多, 故電機(jī)表現(xiàn)為輸入減小, 輸出略有減小, 溫升稍有上升. 因此, 對風(fēng)扇電機(jī)來說, 當(dāng)采用阻抗保護(hù)時(shí), 若堵轉(zhuǎn)溫度超過標(biāo)準(zhǔn), 可考慮改用細(xì)一檔的線, 往往能解決問題, 而對轉(zhuǎn)速風(fēng)量的影響是很小的.定子漏抗包括槽漏抗xs, 端部漏抗xe, 諧波漏抗xδ及磁橋漏抗xb,它們的增大將引起最大轉(zhuǎn)矩的減小, 而罩極電機(jī)為了充分利用其工作可靠的特點(diǎn)往往將額定工作點(diǎn)安排在最大轉(zhuǎn)矩附近(尤其是風(fēng)扇用電機(jī)), 其中以xb增大, 會使高速段轉(zhuǎn)矩明顯下降, 比其余漏抗更為不利. 因此一定要控制磁橋的厚度, 決不可太厚, 導(dǎo)致漏磁過大���。
6.5 轉(zhuǎn)子電阻r2
氣隙磁場為圓形與橢圓時(shí), r2的大小對轉(zhuǎn)矩的影響是不一樣的, 在對稱電機(jī)中, 氣隙為圓形旋轉(zhuǎn)磁場, r2增大時(shí), Tmax的轉(zhuǎn)差率增大, 而Tmax值不變, 中速區(qū)凹下減小, Tst增大. 在罩極電機(jī)中, 各繞組的磁勢不能滿足圓型磁場的三個(gè)條件, 因此總存在負(fù)序分量. 當(dāng)r2變化時(shí), 正序轉(zhuǎn)矩和負(fù)序轉(zhuǎn)矩分別按對稱電機(jī)T-n曲線變化規(guī)律, 從而其合成轉(zhuǎn)矩, 當(dāng)r2增大時(shí)不但Tmax的轉(zhuǎn)差率增大, 凹下減小, 而且Tmax值減小, 而Tst卻變很小, 這種情況可由圖5說明�。
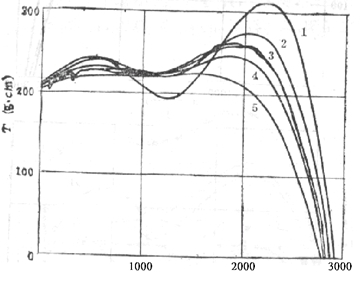
圖5 轉(zhuǎn)子電阻對機(jī)械特性的影響 (電阻隨序號增大)
事實(shí)上, Tst與r2之間有一個(gè)最佳值, r2在某一值時(shí)Tst將獲得最大值. 因此, 罩極電機(jī)還是盡量減小r2為好, 以求大的輸出. 不過當(dāng)電機(jī)采用抽調(diào)速的話, 降速時(shí)整條T-n曲線要下降, 就有可能使電機(jī)陷入低速爬行, 到不了應(yīng)有的穩(wěn)定轉(zhuǎn)速�。
在幾瓦的小電機(jī)中, 應(yīng)盡量采用少槽淺槽轉(zhuǎn)子, 這對穩(wěn)定鑄鋁質(zhì)是大有好處的, 因?yàn)闆_片本來很小, 槽一多, 每槽面積就小, 再若槽深一點(diǎn), 則尤其槽底部易出現(xiàn)打不足現(xiàn)象, 甚至斷排, 造成電機(jī)質(zhì)量波動(dòng)。
6.6 氣隙長度δ
對異步電機(jī)而言, 從正弦波時(shí)的理論分析可知, δ應(yīng)盡可能小, 因?yàn)?delta;小, 激磁電抗增大, 從而激磁電流減小, 降低了空載電流, 使功率因子上升����、 效率提高。但是δ小了, 精加工精度要求高, 易造成偏心值(相對值)增加, 使制造和運(yùn)行都增加困難�����。 另外, 氣隙中并不是正弦波, δ小了, 諧波磁場及諧波漏抗增大, 導(dǎo)致Tst���、Ist和Tmax減小, 并且諧波轉(zhuǎn)矩和附加損耗增大, 造成較高溫升和較大噪音����。在罩極電機(jī)和其它單相電機(jī)中,δ取的比三相電機(jī)大一些是有好處的:
(a) δ大一些, 定轉(zhuǎn)子諧波漏抗和轉(zhuǎn)子斜槽漏抗減小, 其結(jié)果是Tst和Ist均增加, 由于Tst增和率大于Ist, 故δ適當(dāng)大一些可改善電機(jī)的起動(dòng)性能。而且由于Tmax與電機(jī)漏抗成正比, 故氣隙增大, Tmax可提高��。
(b) δ大一些, 減小了定��、轉(zhuǎn)子諧波磁通幅值, 由于雜散耗與諧波磁通幅值的平方成正比, 故大的δ可減小電機(jī)的雜散耗, 使效率稍有增加�。當(dāng)然, δ大了, 不僅空載電流增加、功率因子下降, 也使負(fù)載轉(zhuǎn)差率有所下降(即轉(zhuǎn)速有所上升), 負(fù)載電流也有所上升, 實(shí)際效率的增減要看哪一個(gè)因素為主導(dǎo)�����。
(c) δ大一些, 可使轉(zhuǎn)子表面損耗下降, 從而轉(zhuǎn)子表面發(fā)熱大為減小, 向定子輻射熱量減小, 故溫升應(yīng)下降. 但若δ加大過多, 將使氣隙所需磁勢增加, 這勢必由增大輸入電流來補(bǔ)充, 從而使電機(jī)飽和程度增加, 銅耗增加, 溫升反而上升���。
(d) δ大一些, 即使氣隙的實(shí)際偏心值不變, 其相對值(氣隙不均勻度)小了, 這在單相電機(jī)中尤為重要. 因?yàn)闅庀恫痪鶆蚨葘?dǎo)致單相電機(jī)在不同轉(zhuǎn)子位置有不同的起動(dòng)轉(zhuǎn)矩, 而減小氣隙不均勻度將減小Tst的波動(dòng). 而且由于δ加大削弱了高次諧波, 使附加轉(zhuǎn)矩減小, 從而電機(jī)的Tmin增加, 即T-n曲線中速區(qū)的凹下減小。
(e) 由于任意兩個(gè)諧波磁場相至作用產(chǎn)生的徑向力約與δ2成正比, 故δ大一些可降低噪音及減小振動(dòng). 理論分析可知, 當(dāng)氣隙由δ1改變?yōu)?delta;2時(shí), 相應(yīng)的電磁噪聲級彎化近似為L1-L2=10 lg(δ2/δ1)4dB, 當(dāng)然, 由于空載電流增大等原因, 實(shí)際中小于上式計(jì)算值�����。
基于上述原因, 在單相電機(jī)中, 氣隙值一般要比三相電機(jī)大0.05~0.1mm, 一般情況下, 使用滾珠軸承時(shí), 取0.25~0.35mm, 而使用滑動(dòng)軸承時(shí), 由于更易產(chǎn)生偏心的緣故, δ增加10%~20%, 對于罩極電機(jī), 由于氣隙中的諧波成分更嚴(yán)重, 故δ更應(yīng)大一些, 尤其是方形電機(jī), 多采用支架形式, 更易造成偏心, 故其δ常取到0.35~0.45 mm���。
7.罩極電機(jī)主要尺寸及性能確定:
7.1 效率及功率因子初值:0.05~0.12 ( 0.2~10瓦 )�,0.10~0.26 ( 10~100瓦 )
其中: η’─效率
COSψ’─功率因子
7.2 電機(jī)常數(shù):
其中: CA──電機(jī)常數(shù)
Dil─定子內(nèi)徑(cm)
l─鐵芯長度(cm)
n─轉(zhuǎn)速(轉(zhuǎn)/分)
7.3 長度直徑比: 
7.4計(jì)算長度:  (厘米)
(厘米)
7.5定子內(nèi)徑: (厘米)
(厘米)
7.6氣隙長度δ=0.025~0.05(厘米)
7.7極距:  (厘米) 其中 P──極數(shù)
(厘米) 其中 P──極數(shù)
7.8極弧長度:  (厘米) 其中:
(厘米) 其中: 
7.9轉(zhuǎn)子外徑:  (厘米)
(厘米)
7.10轉(zhuǎn)子內(nèi)徑(軸孔):dB=(0.18~0.24)D2(厘米)
7.11轉(zhuǎn)子槽數(shù)Z2按表1選取:
極數(shù) 轉(zhuǎn)子槽數(shù)Z2
2 11,12,15,18
4 11,17,22,57
6 26,33
7.12轉(zhuǎn)子斜槽角度計(jì)算:
斜槽角度= 
7.13定子槽滿率 
其中: η──槽滿率
dM──漆包線最大直徑(mm)
WN──每極下繞組每槽匝數(shù)
S──電機(jī)定子槽率面積(mm2)
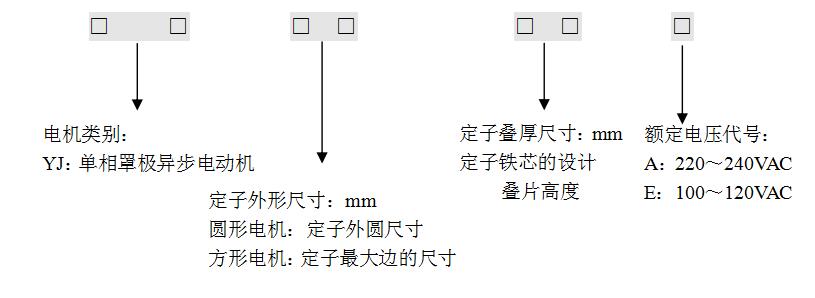
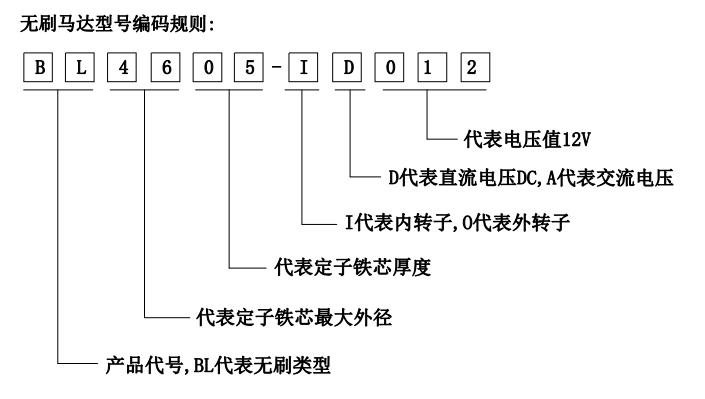
8.電機(jī)型號由產(chǎn)品代號��、尺寸規(guī)格和額定電壓代號三部分組成,具體如下: